Hello @ Modisch Fabrications
Hi, I'm Robin Modisch. I am a software developer, engineer, and maker based in Germany. I specialize in high-skill challenges that bridge the digital and physical domains. Whether it is developing versatile software stacks, designing custom electronics, or leveraging 3D printing and traditional fabrication to solve unique everyday challenges, I build complete systems from the ground up. If you have a concrete problem spanning multiple disciplines, you are in the right place.
Scroll down for details and follow me on my socials:

Statistics
Expertise
CAD, 3D Printing & Lasercutting
Extensive experience in Computer-Aided Design for 3D Printing, Lasercutting, and rapid prototyping.
Electronics & IoT
Specialized in embedded systems, schematic and PCB design with KiCAD, and connecting hardware to the web.
Software Engineering
Engineering complete software architectures, from modern web platforms and complex data pipelines to custom APIs bridging the web and hardware.
Robotics & Automation
Hands-on experience in controlling a variety of sensors and actuators, translating code into physical movement.
Usability & Mixed Reality
Developing interactive, user-focused experiences and games across various platforms, particularly using Unity for VR and AR environments.
Applied AI
Integrating AI into development workflows for code generation and creating custom intelligent tools, focusing on engineering over hype.
Epoxy & Silicone
Fusing art with functionality to create custom silicone molds, premium resin enclosures, tactile novelties, and unique sculptures.
Wood & Metalworking
Tinkering with forging, welding, and cutting to build practical physical solutions, from heavy-duty utility mounts to bespoke everyday objects.
Projects
ModischMatrix
Pretty Pixels on a homemade Matrix. Features an ESP32-powered HUB75 RGB panel with a custom PCB, FastLED animations, hidden capacitive touch controls, and a local REST API via an Async WebServer.
A completely local-first IoT device. This project is a showcase of end-to-end integration, encompassing 3D-printed hardware, custom electronics, embedded C++, and networking, all the way up to a frontend web interface.
Hardware:
ESP32 Microcontroller, 3D-Printed Enclosure
Custom PCB:
HUB75 Matrix Driver Board
Firmware:
PlatformIO, C++, FastLED
Interface:
Full Web Control, Local REST API, WiFi Captive Portal

Drone Simulator VR
An immersive Unity VR flight simulator offering physically accurate drone dynamics and training scenarios. Developed with 0Space Studios and released on all major platforms.
Ribbed Vase
One of many 3D-printable vase designs, featuring mesmerizing, fluid patterns. Engineered to be printed as one continuous extrusion loop for a completely seamless finish. Published for free personal use, it quickly became an instant hit within the 3D printing community worldwide.
Interested in selling prints of this or any other design commercially? Commercial licenses are available here.
Views:
100K+
Downloads:
40K+
Units sold:
300+

Autonomous Rover
ROBIT is a teaching and learning platform meant to teach pupils the basics of robotic systems. The goal is to retrieve an imaginary treasure from the bottom of the dark sea, where only sonar can be used to detect anything. The drone has to find, collect and deliver autonomously without external control.
The algorithm is simple: Drive in straight lines, turning at boundaries detectable by IR. Rotate frequently, collect distance readings, drive towards the closest treasure. Collect it via magnet, raise it and drive out of the sea. The main challenge is to do all that in realtime on a microcontroller with cheap peripherals.
Hardware:
Arduino Nano, HC-SR04 Ultrasonic sensor, KY-024 Hall Sensor, MPU6050 Gyro + Accelerometer, IR Sensor, L9110S Motor Driver, 2x Geared Motor, Servo, 10x WS2812B RGB LED

Crystal Coasters
Digital design, physical process: A 3D-printed positive was cast in silicone to create a mold. The wood was then routed to size with a 3D-printed template and cut into inlays by hand. These inlays were then placed and cast in epoxy resin within the silicone mold. The resulting piece was trued up with a belt sander first and then polished up to 800 grid.
Tools:
Router, Oscillating Saw, Belt Sander, Orbital Sander
Material:
Acacia Wood, Epoxy Resin, Mica Pigments

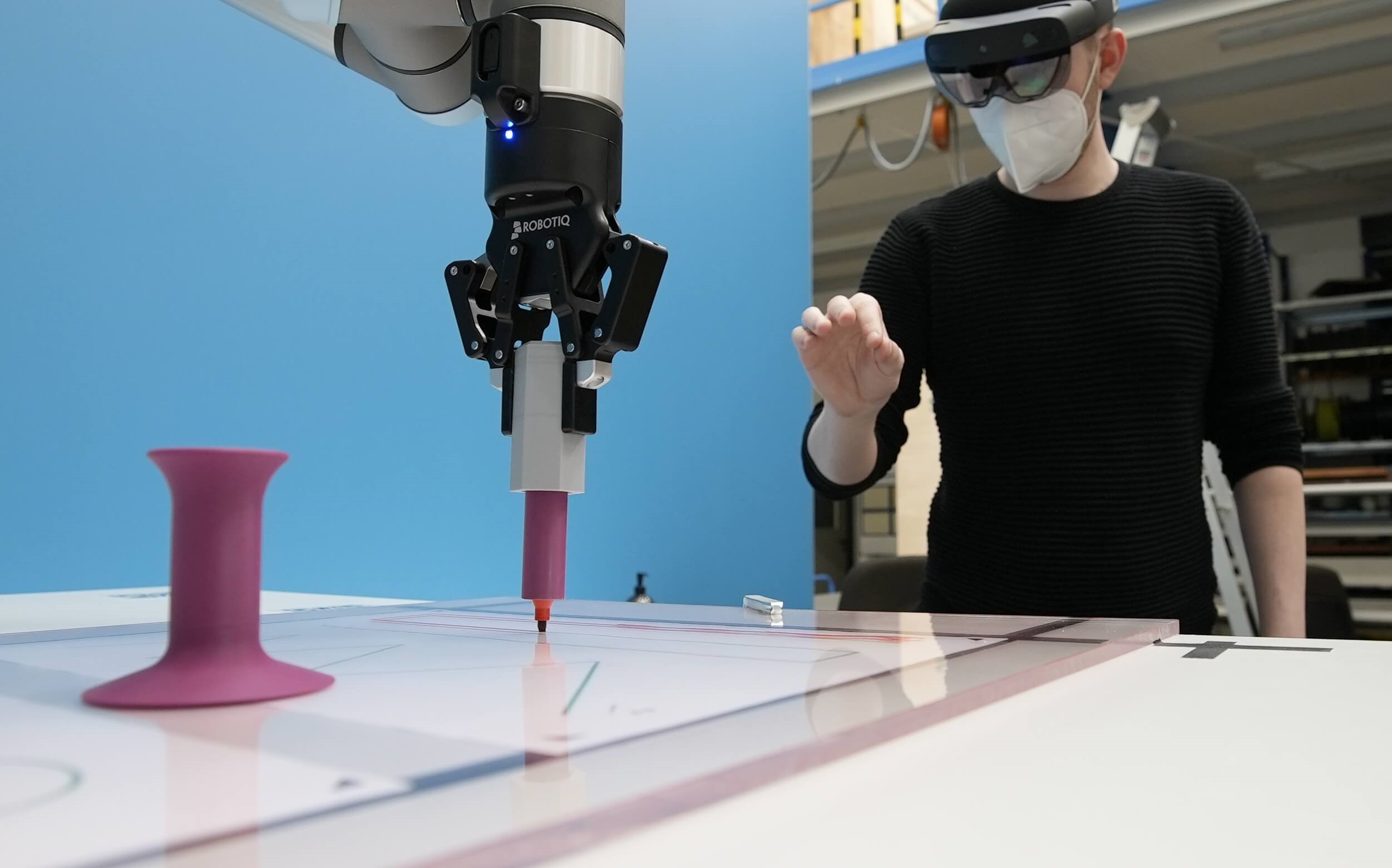
Mixed Reality Robot Remote
Immersive gesture-based robot control based on mixed reality; validated with real test subjects in a closed study.
This project was part of my master's thesis in collaboration with Siemens. The aim was to develop a new type of robot controller that enables flexible access to production systems without physical access. It's a mixture of robotics, usability design, networking and mixed reality that fit perfectly into my skillset.
Hardware:
Universal Robot's UR5e; Microsoft Hololens 2
Middleware:
Python + URControl
Frontend:
Unity + MRTK
3D-printed Tools & Utilities
CutSolver
Free and open-source webservice to minimize waste by optimizing cut placements. Set your available stock length, estimate cut widths, fill in the quantity and size of your desired pieces and let this tool handle the calculations.
Technically speaking this is an NP-hard optimization problem. This website uses a perfect bruteforce solver for smaller quantities with on-demand fallback to a faster first-fit-decreasing solver if it would exceed 12! permutations.
Frontend:
Vue + Bootstrap
Backend:
Python + FastAPI
DevOps:
Docker + Caddy on OCI

Indestructable Tree Stand (v1)
Rugged by design and fabricated from heavy-duty materials for outdoor use; created as a prototype. Bulky enough to be a traffic stopper for upcoming generations with roughly 23 kg.
Born out of the necessity to present a christmas tree securely - Most commercially available alternatives are too weak & unstable for wind and weather.
Trivia: This was actually planned and created with CutSolver.
Tools:
Angle Grinder, Flux-Cored Welder, Step Drill
Material:
40x40x5mm Steel Square Tube; Stainless Screws
Finish:
Sandblasting + Hammerite

And many more that I couldn't show here...
Contact me and I will tell you the (non-NDA) details.
About me
I am a Software Developer, Engineer, and Maker based in Germany. With over 11 years of experience across commercial development and physical fabrication, my goal is simple: I want to be able to build absolutely anything.
My academic journey began with a Bachelor's in Electronics and culminated in a Master's in Computer Science from FAU Erlangen-Nürnberg. Professionally, I've worked on prototypes at Siemens and currently lead developments as a CTO at NeoBird.
In my downtime, this platform is my chaotic sandbox. It is a space for creative engineering where I step away from commercial constraints to solve tangible, real-world problems. I am driven by mechanics and logic, and I actively seek out challenges that require me to apply multiple disciplines to bring a complex concept to life.

Frequently Asked Questions
What kind of projects do you take on?
I actively seek out high-skill tasks with a high degree of freedom, inspired by concrete, real-world problems. Whether it requires bridging the physical and digital (like designing a custom PCB and writing the firmware) or purely physical fabrication like casting custom epoxy molds, the goal is always to build a complete, functional system.
Are there tasks you actively avoid?
I am an engineer, not a magician. I leave the voodoo of high-frequency RF engineering, deep ML mathematics, and bare-metal kernel development to others. I also avoid trivial tech support, extreme micro-optimization in a single narrow silo, and corporate overhead. When I am off the clock, I have zero interest in team management or business development. I just want to build and solve hard technical problems.
Let's Chat!
Got questions, cool ideas, or just want to say hi?